画像ベースの深度推定は、1枚または複数枚の画像からシーンの深度情報を推定するコンピュータービジョン技術です。レーダーやライダーを使用しないでも、カメラで撮影した画像から直接3D空間情報を抽出できます。自動運転、ロボットナビゲーション、3D再構成など、様々なアプリケーションに応用できます。
近年、深度推定は自動運転、拡張現実(AR)、仮想現実(VR)で大きな可能性を示しています。RGB画像から深度を推定することで、高価な深度センサーへの依存を大幅に低減し、さまざまなアプリケーションの可能性を広げます。ただし、単眼カメラでの深度推定は、複雑なシーンや遮蔽物がある場合に精度が制限されることがあります。そこでステレオビジョン技術を用いて視差を計算することで、より正確な深度情報が得られ、深度推定の精度を大幅に向上できます。この手法は、画像内の対象物の相対距離だけでなく3D空間での絶対距離を推定することもでき、自動運転やマップ再構成に不可欠です。
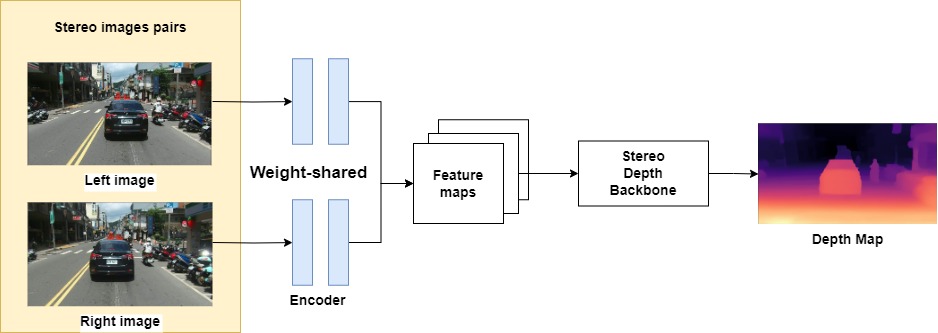
ステレオ深度推定の技術アーキテクチャは、主に、1) 画像特徴抽出、2) 視差コストボリュームの構築と集約、3) 視差または深度範囲の確率分布の推定、の3要素から構成されます。応用分野として、画像から取得した深度マップを用いて高精度マップを再構成したり、3D物体認識に強化された3D空間情報を提供することなどが挙げられます。
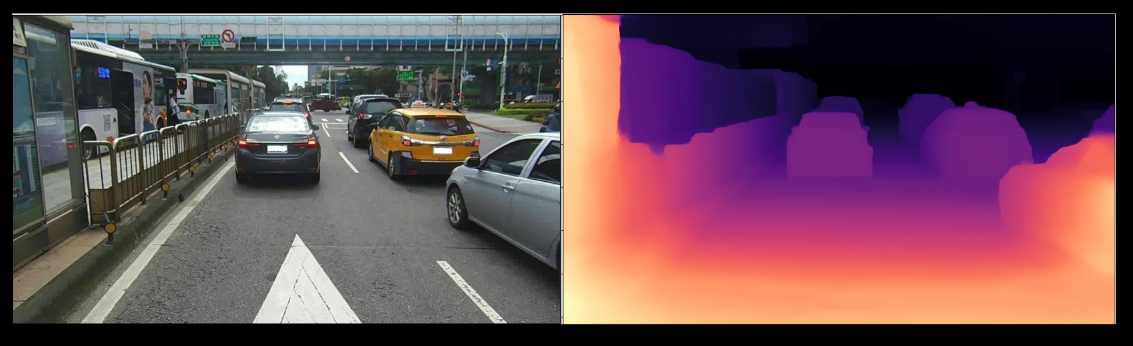
結果
デモ 1
高精度マップ

デモ2

高精度マップ
