Image-based depth estimation is a computer vision technique that infers the depth information of a scene from one or more images. This technology allows us extract 3D spatial information directly from images captured by cameras, without radar or lidar. Such technology can be applied to multiple applications, including autonomous driving, robotic navigation, and 3D reconstruction.
In recent years, depth estimation has shown great potential in autonomous driving, augmented reality, and virtual reality. Estimating depth from RGB images can significantly reduce the dependence on expensive depth sensors while expanding possibilities for various application scenarios. However, when using monocular camera to estimate depth, the accuracy is often limited in complicated scenes and occlusions. Taking advantage of, stereo vision techniques, calculating disparity, more precise depth information can be obtained, thereby greatly improving the accuracy of depth estimation. This method not only helps estimate the relative distance of objects in an image but also infers their absolute distance in 3D space, which is crucial for autonomous vehicles and map reconstruction.
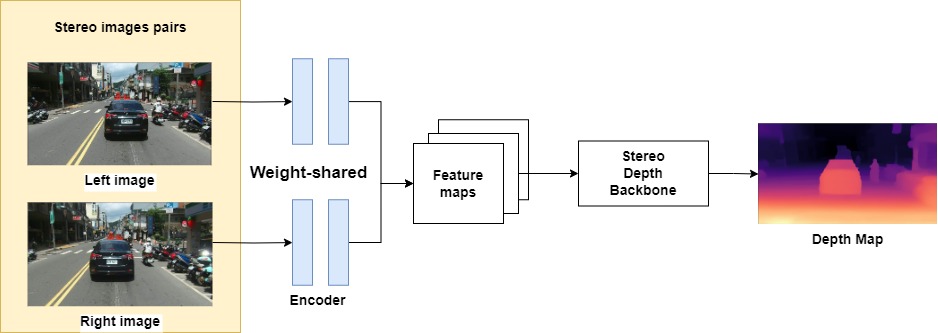
The technical architecture of stereo depth estimation mainly consists of three core components: image feature extraction, disparity cost volume construction and aggregation, and probability distribution prediction of disparity or depth ranges. The applications include using depth maps obtained from images to reconstruct high-precision map and to provide enhanced 3D spatial information for 3D object detection.
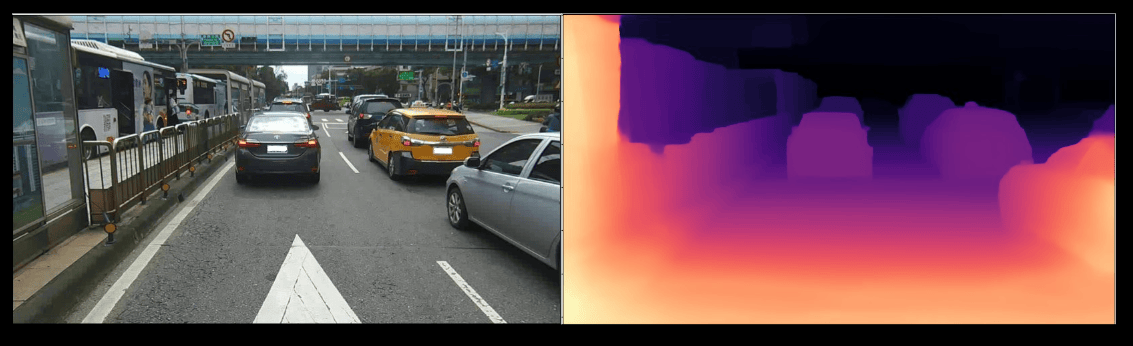
Result
Demo 1
high-precision map

Demo 2

high-precision map
