Cross-Spectral Stereo Image Fusion aims to combine image features from different spectral ranges to enhance accuracy and detail in image analysis. In low-light or completely dark environments, long-wave infrared (LWIR) cameras provide reliable imaging, while RGB cameras offer rich color and texture information. Our technology fuses both images to provide more comprehensive information under various lighting conditions.
Stereo matching techniques can establish feature correspondence between images from the two cameras. Given the significant feature differences in cross-spectral contexts, we have developed a matching model which can simultaneously process RGB and LWIR features. Using generative model, we align features from both perspectives, which are then used as input to the matching model.
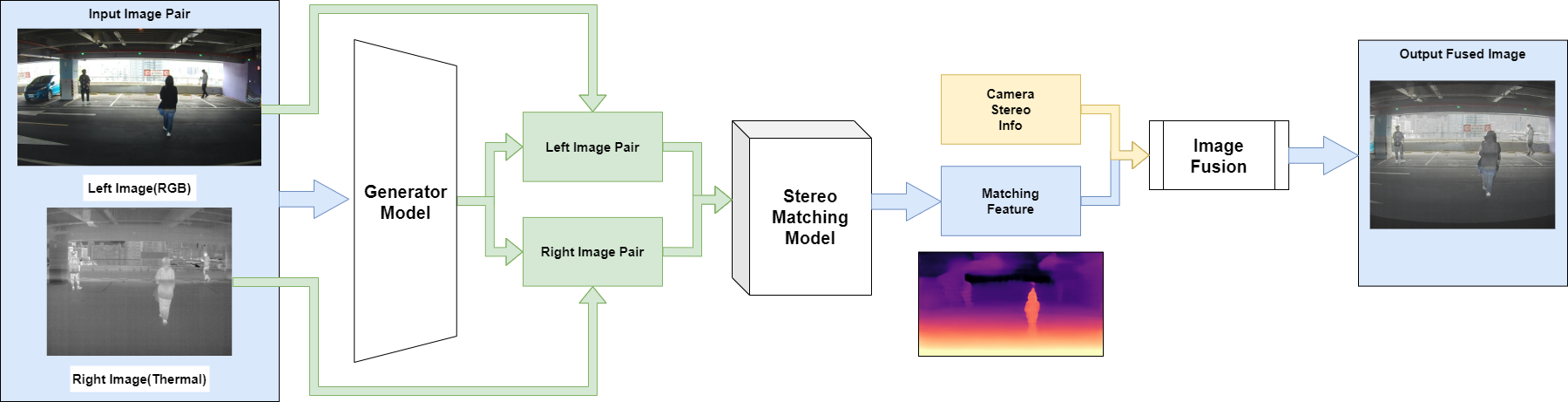
This cross-spectral stereo matching technology enhances the 3D reconstruction and scene understanding under different types of images. That makes it extremely valuable across multiple application domains.
Application Domains:
Autonomous Driving: Provides more accurate environmental perception and object recognition under various lighting conditions.
Surveillance Systems: Improves the usability and accuracy of surveillance images in low-light or nighttime conditions.
Medical Imaging: Offers additional diagnostic information, enhancing the effectiveness of medical image analysis.
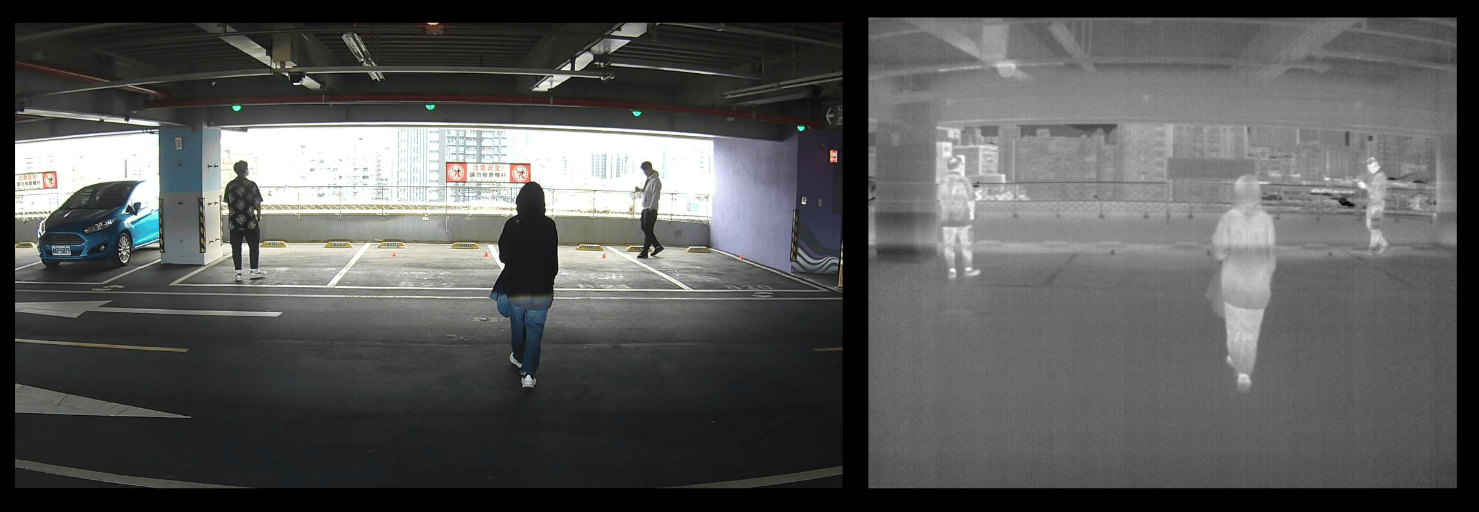
Result
input
matching feature
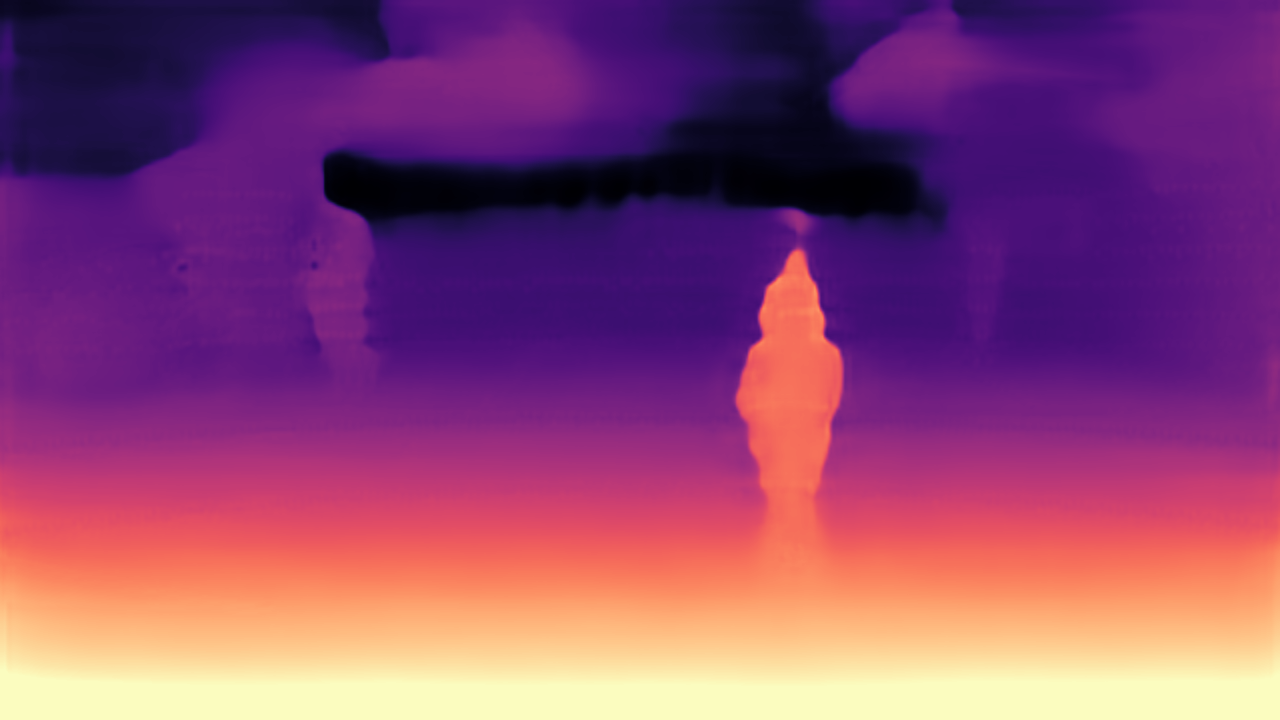
image fusion
