追蹤演算法(Tracking Algorithm)在多種應用場景中發揮關鍵作用,尤其是在ADAS產品中,此技術用於追蹤同一物體,進而預測其他車輛及行人的移動方向。
在各類應用如監控系統、自動駕駛等領域,追蹤演算法扮演著不可或缺的角色,但同時也面臨諸多挑戰,包括:
遮擋問題:當目標物被其他物體遮擋,追蹤會變得困難。這要求演算法能預測目標物的位置或從多個視角進行分析,以有效處理遮擋。
環境變化:光線變化和天氣條件等外部因素可能影響追蹤效果。因此,演算法需具備適應這些變化的能力,以維持穩定的追蹤性能。
目標變形:追蹤對象可能會變化其形狀或姿態,需要演算法在不同的形態下依然能識別並追蹤目標。
多目標追蹤:演算法需能夠同時追蹤多個物件和多個類別,且確保這些物件之間不發生混淆。
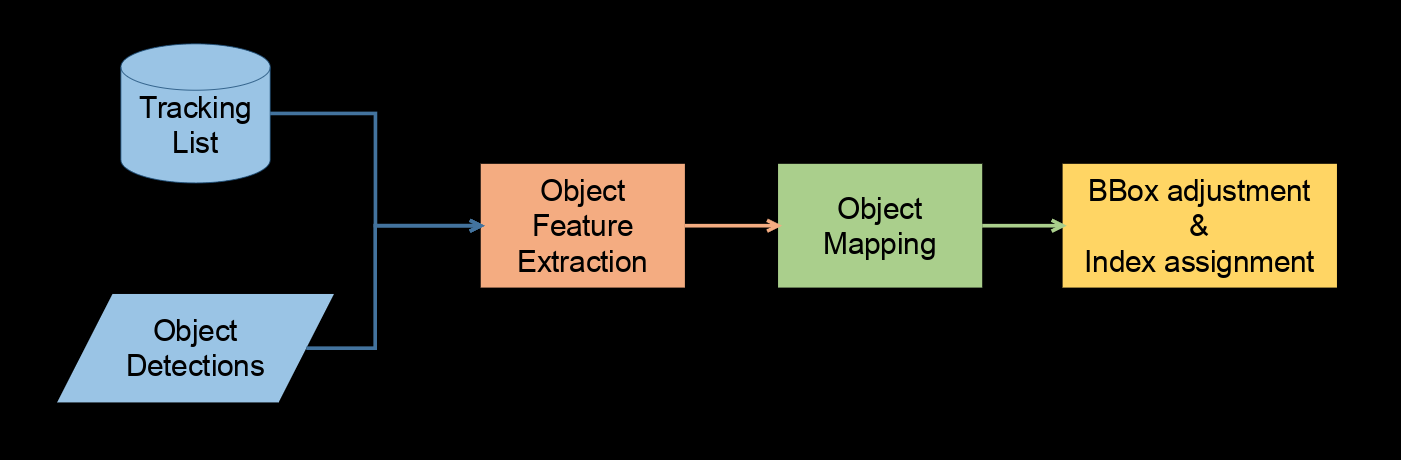
為了克服這些挑戰,我們提出了一套新的追蹤演算法,具有以下優勢:
物件追蹤:在自動駕駛領域,此演算法能自動識別並追蹤車輛或行人,進一步提升行駛的安全性。
追蹤穩定性:有效解決物件框閃爍的問題,實現對物件的持續且穩定追蹤。
多物件追蹤:能夠針對不同類別,如行人、汽車或摩托車,進行專屬的追蹤任務。
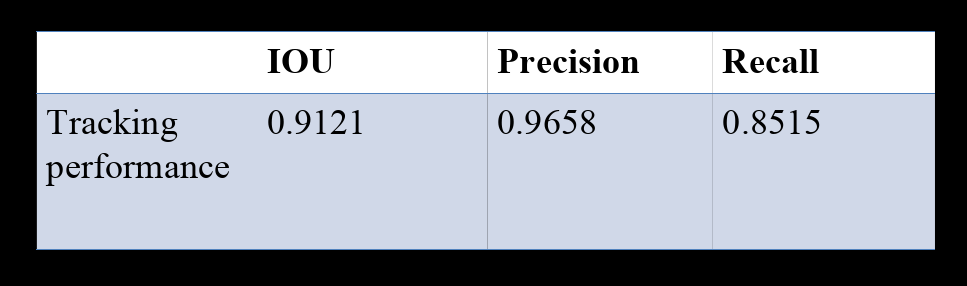
成果

