基於影像的深度估計是一種電腦視覺技術,主要從單張或多張影像中推斷出場景的深度訊息。這種技術允許從一般相機捕獲的影像中,直接提取三維空間的訊息,無需依賴如雷達或光達等專門的硬體設備。此技術的應用範圍非常廣泛,包括自動駕駛汽車、機器人導航以及三維重建等領域。
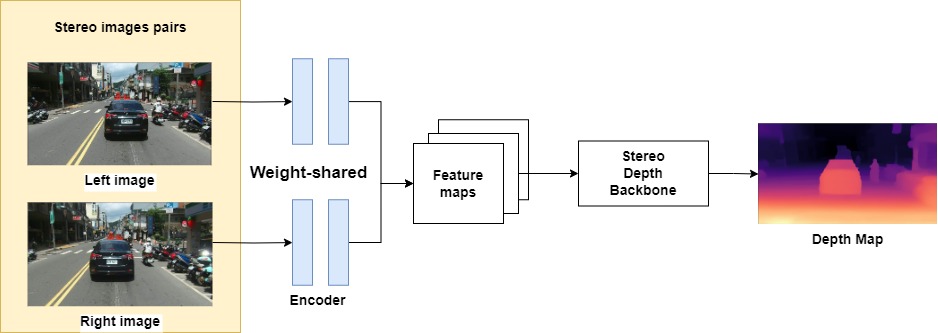
近年來,影像深度估計技術在自動駕駛、擴增實境、虛擬實境等領域展示了巨大的應用潛力。透過RGB影像估計深度,不僅能顯著降低對昂貴深度感測器的依賴,同時擴展了更多應用場景的可能性。然而,使用單眼相機估計深度時,在處理複雜場景和遮擋問題上的精確度仍有限。此時,採用立體視覺技術(Stereo Vision),通過計算視差(Disparity),進一步來取得更精確的深度資訊,可以顯著提高深度推測的精確性。這種方法不僅有助於推測影像中物體的相對距離,還能估計出物體在三維空間中的絕對距離,對無人駕駛和地圖重建等技術至關重要。
雙目深度估計的技術架構主要包含三個核心元素:影像特徵提取、視差代價體建構、聚合、以及視差與深度區間機率分布預測。這一技術的應用實例包括使用影像取得的深度圖進行高精度地圖的重建,以及為3D物件偵測提供三維空間資訊的數據增強。
成果
範例 1
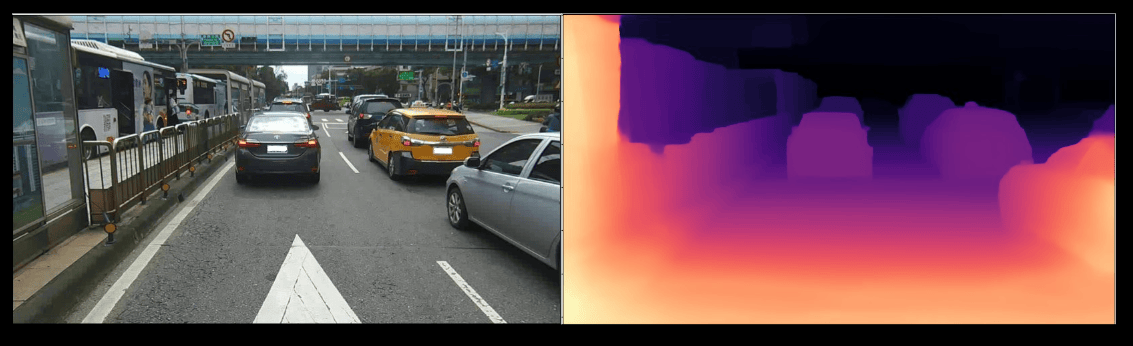
高精度地圖

範例 2

高精度地圖
